일반적으로 자동차의 동력 보조 조향장치로는 유압 펌프의 유압을 이용한 유압식 동력 보조 조향장치(Hydraulic Power Steering Apparatus)가 사용되고 있지만, 1990년대 이후 전동 모터를 이용한 전기식 동력 보조 조향장치(Electric Power Steering Apparatus)가 점차로 보편화되어 가고 있다.
기존의 유압식 동력 보조 조향장치는 동력을 보조해 주는 동력원인 유압 펌프가 엔진에 의해 구동되어 조향휠의 회전 여부와 관계없이 항상 에너지를 소모하는 데 비해서 전기식 동력 보조 조향장치는 조향휠이 회전하여 토크가 발생되면 전기 에너지로 구동되는 모터가 조향 보조 동력을 제공한다. 따라서, 전기식 동력 보조 조향장치를 사용하는 경우 유압식 동력 보조 조향장치에 비해 차량의 에너지 효율을 향상시킬 수 있다.
한편, 차량이 직진으로 주행 시 내/외적 요인에 섀시 시스템의 좌/우 불균형이 발생하여 운전자의 의지와 상관없이 차량이 좌/우 중 어느 한쪽으로 치우치게 되는 차량용 쏠림(Steering Pull) 현상이 발생할 수 있다. 종래에는 이러한, 차량용 쏠림 현상이 발생하는 경우 운전자가 차량의 직진성을 유지하기 위하여 일정한 힘으로 핸들을 조작하여, 조향휠이 차량 쏠림의 반대방향이 되도록 조작하여야 하는 단점이 있었다. 또한, 주행 중 발생하는 차량용 쏠림 현상으로 인해 운전자의 편의성, 안전성 및 차량의 직진성이 저하되는 단점이 있었다.
다음 첨부 된 그림들을 참조하여 상세히 설명한다.

그림 1. 영상 신호를 이용한 차량용 쏠림 방지 장치의 개략적인 블럭 구성도
그림 1은 영상 신호를 이용한 차량용 쏠림 방지 장치를 개략적으로 나타낸 블럭 구성도이다. 영상 신호를 이용한 차량용 쏠림 방지 장치는 센서부, ECU(Electronic Control Unit) 및 모터를 포함한다. 센서부는 카메라 모듈, 토크 센서, 조향각 센서 및 차속 센서를 포함한다. 센서부가 카메라 모듈, 토크 센서, 조향각 센서 및 차속 센서만을 포함한 것으로 기재하고 있으나, 이는 이 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 이 기술 분야에서 통상의 지식을 가진 자라면 본질적인 특성에서 벗어나지 않는 범위에서 센서부에 포함되는 구성 요소를 다양하게 수정 및 변형할 수 있을 것이다.
카메라 모듈은 차량의 전방에 탑재되어, 차량의 주행 중에 차선 및 도로 상태를 촬영한 전기적 영상 신호를 ECU로 전달하는 기능을 수행한다. 토크 센서(Torque Sensor)는 조향휠의 회전에 따른 입력축 및 출력 축의 상대 회전 변위를 감지하여 전기적 신호를 생성하고 ECU로 전송하는 역할을 수행한다. 설명의 편의상 토크 센서에서 생성된 전기적인 신호를 핸들 토크 신호(γ)로 가정하여 설명하도록 한다.
조향각 센서는 운전자의 조작에 의해 회전하는 조향휠의 회전각도를 측정한 신호를 생성하여 ECU로 전송하는 기능을 수행한다. 설명의 편의상 조향각 센서에서 조향휠의 회전각도를 측정한 신호를 조향각 신호로 가정하여 설명하도록 한다.
차속 센서는 차량의 차속을 감지하며, 감지된 차속에 비례하는 전기적 신호를 생성하여 ECU로 전송한다. 편의상 차속 센서에서 생성된 전기적인 신호를 차속 신호로 가정한다. ECU는 센서부로부터 각종 신호를 수신하여 자동차의 주행 상태를 파악한 후 모터에 흐르는 전류량을 조절함으로써 모터의 구동을 제어하는 기능을 수행한다. 이 기술에서 ECU는 센서부로부터 각종 신호를 수신하는 기능을 수행한다. 또한 ECU는 센서부의 차속 센서로부터 수신한 차속 신호가 기 설정된 제 1 차속(V1)을 초과하는 지의 여부를 확인한다.
확인 결과, 차속 신호가 기 설정된 제 1 차속(V1)을 초과하는 경우, ECU는 센서부의 토크 센서로부터 수신한 핸들 토크 신호(γ)가 기 설정된 조향력(t) 미만이며, 핸들 토크 발생 시간(Time)이 기 설정된 시간(S)을 초과하는지의 여부를 확인한다.
또한 핸들 토크 신호(γ)가 기 설정된 조향력(t) 미만이며, 핸들 토크 발생 시간이 기 설정된 시간(S)을 초과하는 경우, ECU는 차선 유지 모드(Lane Keeping Asist Mode)를 구동하여 조향각 센서로부터 수신한 조향각 신호에서 카메라 모듈로부터 수신한 영상 신호를 분석하여 산출한 영상 조향각을 차감한 값만큼 조향각을 보상하는 상쇄 신호를 모터로 전송하는 기능을 수행한다.
한편, 확인 결과 차속 신호가 기 설정된 제 1 차속(V1)을 초과하지 않는 경우, ECU는 차량이 저속으로 주행 중인지의 여부를 확인한다. 혹은 차량이 저속 주행 중인 경우, ECU는 차량이 차선을 벗어나는지의 여부를 확인하며 차량이 차선을 벗어나는 경우, ECU는 핸들에 발생한 토크값을 수신하고, 토크값이 기 설정된 임계치를 초과하는 경우, 운전자에 의한 실제 조향으로 판단한다.
토크값이 기 설정된 임계치를 초과하지 않는 경우, ECU는 핸들에 발생한 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하는지의 여부를 확인하며, 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하는 경우, ECU는 운전자에 의한 실제 조향으로 판단한다.
마지막으로 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하지 않는 경우, ECU는 운전자에 의한 실제 조향이 아닌 것으로 판단하여 차선 이탈에 대한 음성 경고 메시지를 출력하도록 제어한다. 모터는 조향을 원활하게 하는 보조 동력을 생성하는 기능을 수행한다.
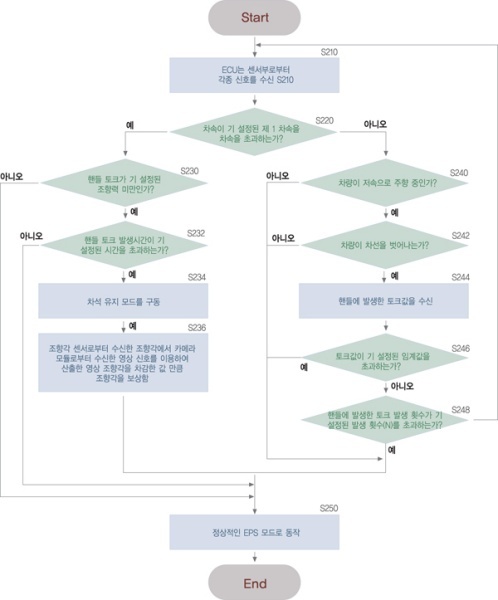
그림 2. 영상 신호를 이용한 차량용 쏠림 방지 방법을 설명하기 위한 순서도
그림 2는 영상 신호를 이용한 차량용 쏠림 방지 방법을 설명하기 위한 순서도이다. ECU는 센서부로부터 각종 신호를 수신한다(S210). 여기서, ECU는 센서부의 카메라 모듈로부터 영상 신호를 수신하고, 토크 센서로부터 핸들 토크 신호(γ)를 수신하고, 조향각 센서로부터 조향각 신호를 수신하고, 차속 센서로부터 차속 신호를 수신할 수 있다. ECU는 센서부의 차속 신호로부터 수신한 차속 신호가 기 설정한 제 1 차속(V1)을 초과하는지의 여부를 확인한다(S220).
단계 S220의 확인 결과, 차속 신호가 기 설정한 제 1 차속(V1)을 초과하는 경우, ECU는 토크 센서로부터 수신한 핸들 토크 신호(γ)가 기 설정된 조향력 미만(t)인지의 여부를 확인한다(S230). 단계 S230의 확인 결과, 핸들 토크 신호(γ)가 기 설정된 조향력 미만(t)인 경우, ECU는 핸들 토크 발생 시간이 기 설정된 시간(S)을 초과하지 않는지의 여부를 확인한다(S232). 즉, ECU는 핸들 토크 신호(γ)가 기 설정된 시간(S) 동안 변동하지 않는지의 여부를 확인하는 것이다.
단계 S232의 확인 결과, 핸들 토크 발생 시간이 기 설정된 시간(S)을 초과하지 않는 경우, ECU는 차선 유지 모드를 구동한다(S234). ECU는 조향각 센서로부터 수신한 조향각 신호에서 카메라 모듈로부터 수신한 영상 신호를 분석하여 산출한 영상 조향각을 차감한 값만큼 조향각을 보상하는 상쇄 신호를 모터로 전송한다(S236). 즉, ECU는 실제 차량이 인식하는 조향각과 영상 신호를 이용하여 산출한 영상 조향각과 차이가 있는 경우 이를 보상하는 것이다.
한편, 단계 S220의 확인 결과, 차속 신호가 기 설정한 제 1 차속(V1)을 초과하지 않는 경우, ECU는 차량이 저속으로 주행 중인지의 여부를 확인한다(S240). 예를 들어서, ECU는 차량이 저속으로 주행 중인지의 여부를 확인하기 위해서, 차속이 기 설정된 제 2 차속(V2)을 초과하고, 기 설정된 제 1 차속(V1) 미만인지의 여부를 확인할 수 있을 것이다. 즉, ECU는 차량의 차속이 제 1 차속(V1)과 제 2 차속(V2) 사이에서 동작할 때 차량이 저속으로 주행 중인 것으로 판단하는 것이다.
단계 S240의 확인 결과, 차량이 저속으로 주행 중인 경우, ECU는 차량이 차선을 벗어나는지의 여부를 확인 한다(S242). 예를 들어서, ECU는 그림 3과 같이 차량과 차선의 거리 중 에 해당하는 거리를 La로 설정하면, │La+1 - La│(차량과 차선과의 거리 변화량) > L(임의의 거리값)를 만족하는 경우 차량이 차선을 벗어난 것으로 판단 할 수 있을 것이다.

그림 3. 주행 중인 차량과 차선과의 거리를 설명하기 위한 예시도
즉, 차량이 차선을 벗어나지 않는 경우, │La+1 - La│(차량과 차선과의 거리 변화량)를 0으로 설정할 수 있는 것이며, 차량이 차선을 벗어나는 경우, │La+1 - La│(차량과 차선과의 거리 변화량)를 0 이외의 숫자로 설정할 수 있는 것이다.
단계 S242의 확인 결과, 차량이 차선을 벗어나는 경우, ECU는 핸들에 발생한 토크값을 수신한다(S244). ECU는 핸들에 발생한 토크값이 기 설정된 임계치를 초과하는지의 여부를 확인한다(S246). 단계 S246의 확인 결과, 핸들에 발생한 토크값이 기 설정된 임계치를 초과하는 경우, ECU는 운전자에 의한 실제 조향으로 판단하여 정상적인 EPS 모드로 동작한다(S250).
한편, 단계 S246의 확인 결과, 핸들에 발생한 토크값이 기 설정된 임계치를 초과하지 않는 경우, ECU는 운전자에 의한 실제 조향이 아닌 것으로 판단하여 핸들에 발생한 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하는지의 여부를 확인한다(S248). 단계 S248의 확인 결과, 핸들에 발생한 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하는 경우, ECU는 운전자에 의한 실제 조향으로 판단하여 정상적인 EPS 모드로 동작한다(S250).
마지막으로 단계 S248의 확인 결과, 핸들에 발생한 토크 발생 횟수가 기 설정된 발생 횟수(N)를 초과하지 않는 경우, ECU는 운전자에 의한 실제 조향이 아닌 것으로 판단하여 운전자에게 차량 이탈에 대한 음성 경고 등을 발생하여 차량의 이탈을 방지할 수 있는 것이다.
<김현경 기자>
저작권자 © CCTV뉴스 무단전재 및 재배포 금지
