본 고에서는 저장된 동영상으로부터 수직과 수평 블록의 시간적 슬라이스 영상과 슬라이스 영상 내 매크로 블록에 해당되는 정보를 이용한 빠르고 정확한 장면전환 검출 알고리즘을 제안한다. 슬라이스 영상으로부터 시, 공간 상관관계의 히스토그램을 구성하고, 이를 그래프 컷 분할 알고리즘에 적용하였다. 처리속도 향상을 위해 영상 전체가 아닌 각각 영상 내 수직, 수평 방향의 중심 부분의 해당되는 위치의 블록에서만 시공간 정보를 추출하여 히스토그램을 구성하였다. 또한 카메라, 물체의 움직임 및 특수효과 변화 등을 효과적으로 검출할 수 있도록 매크로 블록의 움직임과 형태 정보를 이용하여 상당한 변별력 향상을 보였다.
최근 저장된 비디오를 이용한 내용 기반 검색, 색인, 브라우징 및 데이터베이스 구축 등 다양한 멀티미디어 시스템이 등장하고 있다. 이러한 기술들은 장면전환 기술 기반의 알고리즘이 주류를 이룬다. 이는 비디오 데이터를 보다 계층적이고 구조적으로 재구성하는데 장면전환 기술이 매우 효과적이기 때문이다. 비디오 장면전환 검출기술은 크게 압축된 영역에서의 장면전환 검출과 비 압축된 영역에서의 장면전환 검출로 구분할 수 있다.
압축된 영역에서의 장면전환 검출은 부분 복원된 영상의 데이터만을 이용하므로 빠른 검출기술이 가능하다. 기존에 연구된 방법들은 움직임 벡터와 매크로 블록의 DCT(Discrete Cosine Transform)계수를 많이 사용하였다. 그러나 최근 비디오 압축 기술에서는
I 프레임 외에는 DCT 계수를 완전한 디코딩 없이 이용할 수가 없다. 근래의 비디오 저장 기술에서는 매크로 블록의 형태와 움직임 벡터만을 사용할 수 있다. 이 정보만을 이용한 장면전환 검출이 최근 발표되고 있으나 대부분의 실험이 제한된 실험환경으로 실제 적용이 불가능한 경우가 많다.
비 압축 영역에서의 장면전환 검출은 화소 비교나 히스토그램을 사용하는 알고리즘이 주로 이용된다. 이 검출기술은 급진적 장면전환뿐만 아니라 장시간에 걸쳐서 발생하는 점진적 장면전환 검출에도 많은 시도가 있었다. 장면전환 검출기술의 오류 요소인 플래시 라이트 및 카메라, 물체의 움직임 등에는 많은 성능 향상을 보였으나, 과도한 연산량을 요구하는 단점이 생겨 이 기술의 사용을 기피하는 결과를 가져왔다.
본 고에서는 연산 양을 줄이는 효율적인 접근을 위해 디코딩한 영상에서 수직, 수평의 중심 블록 영상만을 이용하여 시공간 히스토그램을 구성하였다. 이는 영상 전체를 사용하지 않기 때문에 시스템의 부하를 줄일 수 있는 효과적인 방법이다. 구해진 시공간 히스토그램에 기반을 두어 단일 영상 내부 분할 및 군집화에서 주로 사용되는 그래프 컷 분할(Graph Cut Partitioning) 알고리즘을 시간적 분할 영역으로 적용하였고, 선택된 시간적 분할 경계영역을 동영상 디코딩에서 얻는 매크로 블록 정보들을 이용하여 최종 판단 과정을 거치는 장면전환 검출 알고리즘을 제안한다.
장면전환 검출 알고리즘
시간적 슬라이스 영상 정보 추출
기존 알고리즘 중 속도 개선을 위해 전체 영상에서 정보를 얻어내는 방식에서 영상에 일부만을 취한 정보만을 이용한 장면전환 검출을 시도하였다. 그중 가장 효과적인 방법의 하나로 그림 1과 같이 수직, 수평 중심부분을 연속된 영상에서 계속적으로 영상을 취하여 시간적으로 구성된 영상 슬라이스로 구성하여 분석하는 방법이 있다.

본 고에서도 이와 유사하게 연속된 영상에서 수직, 수평 중심 영역의 정보만을 취하여 구성하였다. 그림 1은 시간적 슬라이스 영상을 구성하는 방법을 나타낸다. 그림 2(a), (b)는 구성된 시간 수평, 수직 슬라이스 영상이다. 그림 2(c)는 각 장면마다의 대표 영상이다. 슬라이스 영상을 관찰하면 각각 장면전환 및 특정 이벤트마다 특징적인 패턴이 나타난다. 이를 이용하여 다양한 방법으로 장면전환 검출하는 연구가 있다.
그러나 카메라 및 물체의 움직임을 와이프(Wipe)나 디졸브(Dissolve) 같은 특수 효과의 장면전환과 구분하기는 수직, 수평 시간적 슬라이스 영상만으로는 부족하다. 그림 2(d)는 (a)의 첫 번째 장면전환 지점의 박스영역에 확대 영상이다. 영상 위에 십자가는 인트라 블록을 의미하고 화살표는 움직임 벡터를 의미한다. 장면전환이 일어나는 경우 경계 부근에서 인트라 블록이 거의 전 라인에서 나타냄을 알 수 있다. 카메라 움직임을 블록의 움직임 벡터로 예측하여 특수 효과 전환과 구분할 수도 있다. 본 고에서 움직임 벡터와 형태를 이용하여 점진적 장면전환과 카메라 움직임을 구분하는 해결책으로 제시한다.

그림 2. 시공간 슬라이스 영상 구성
(a)수평 (b)수직 (c)슬라이스 영상의 각 장면 마다의 대표 영상들
(d) 첫 번째 장면 변화 부근의 매크로 블록 정보
시공간 히스토그램
본 고에서는 연속된 프레임 사이에 차이의 정도를 얻기 위하여 기존의 알고리즘들과 다르게 시공간 정보를 이용한 히스토그램을 제시한다. 히스토그램은 검출 효과를 높이기 위하여 명암정보와 컬러정보인 Hue를 이용해 구성한다.
기존의 히스토그램 구성은 매 프레임마다 해당 영상 내에서만 히스토그램을 얻어낸다. 이는 히스토그램의 문제인 공간적 관계 정보를 사용하지 않기 때문에 영상을 기술하는데 한계가 있다. 예로 바다나 하늘의 풍경 영상의 경우 유사한 배경에서 장면전환이 일어나더라도 하늘의 색상이 지배적이기 때문에 유사한 히스토그램을 구성함에 변별력이 낮다. 이를 해결하기 위해서 현재 블록의 이웃하는 블록과의 상관관계를 이용하여 히스토그램을 구성한다.
이는 중복되는 지배적인 영상 패턴에 대해 히스토그램 구성 시 비중을 줄이는 방법의 하나이다. 또한 블록의 시간적 상관관계까지 확장시켜 해당 프레임에 앞, 뒤 영상까지 포함한 현재 블록의 이웃하는 3차원 공간상에 26개 블록을 이용하여 시공간 히스토그램을 구성한다.

시공간 히스토그램 구성의 방법은 첫 번째로 모든 영상을 16x16 화소의 매크로 블록마다의 명암과 Hue 평균값을 이용하여 재구성하였다. 그림 3은 시공간 좌표상의 한 블록의 위치와 이웃하는 블록을 보여준다. 식 (1)과 같이 해당 블록과 윈도우내에 이웃 블록의 평균값 m을 이용하여 식 (2)에서 평균값에 해당되는 히스토그램 위치 bin을 1 할당한다. B(x,y,t)는 해당 블록의 명암과 Hue값을 타나낸다. T는 m값에 해당하는 히스토그램 위치 값을 타나내는 변환 표를 의미한다. bin은 히스토그램의 크기 값인 0부터 N값을 가지며, Bin은 바이너리 값인 0, 1을 가진다. N은 히스토그램의 좌표의 크기이며, 본 고에서는 N은 32로 사용하였다.

한 블록과 시공간의 주변 블록에 대한 모든 연산을 통해 Bin을 1과 0으로 작성한다. 구성된 Bin을 이용하여 1로 설정된 히스토그램 좌표 H(n)에만 1을 추가한다. 즉 현재 블록과 주변 블록에 상관관계를 살펴 중복을 제거하여 히스토그램을 구성한다. 표 1은 시공간 히스토그램을 구하는 유사코드(Pseudocode)를 나타낸다. I(t)는 현재 t프레임의 수직, 수평 중심에 해당되는 영역을 나타낸다.

모든 프레임 영상에서 히스토그램을 구한 후 이를 이용하여 프레임간의 차이 값은 식 (3)으로 계산한다. i,j는 프레임 번호, Hi는 전체의 합이 1로 정규화된 히스토그램이며, 매 프레임마다 명암, 색상 값 2개의 히스토그램을 가진다.

그래프 컷 분할을 이용한 검출
그래프 컷 분할(Graph Cut Partitioning)은 영상 처리에서 영상 분할, 군집(Image Segmentation and Clustering)분야에서 많이 사용되는 방법 중 하나이다. 이를 동영상으로 적용한 방법 또한 동영상 분할에서 각광받는 접근법이다. 간단하면서 급진 장면 변화 및 점진적 장면전환 모두에서 효과적이다. 즉, 영상 내에서 군집화를 시간적 차원에서 수직, 수평 슬라이스 영상에서의 군집화의 문제로 변환하는 것이다.
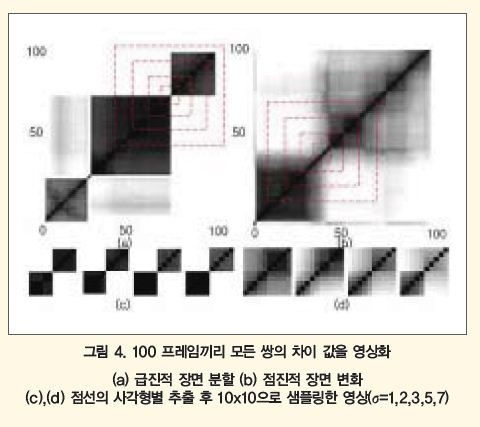
그림 4는 100 프레임내 모든 프레임 쌍끼리 히스토그램 차이 값을 영상화하였다. 영상의 한 화소마다 해당 프레임간의 시공간 히스토그램 차이 값을 0에서 255로 표시하였다. 어두운 부분이 차이 값이 적은 부분이고, 밝은 부분은 차이 값이 큰 부분이다. 그림 4(a)는 급진적 전환이 25, 70 프레임 번호 두 곳에서 발생하였다. 그림과 같이 명확하게 두 개의 검은 정사각형의 모서리가 이웃하는 두 곳을 확인할 수 있다. 그림 4(b)는 40 프레임 번호에서 점진적 전환이 발생하였다.
또한 카메라 움직임 및 빠른 물체의 움직임 또한 이와 유사하게 나타난다. 모든 프레임에서 프레임을 중심으로 앞, 뒤로 σ간격으로 샘플링하여 그림 4(c), (d)와 같은 영상으로 재구성한다. 이는 점진적 장면전환도 넓은 영역에서 재구성해보면 급진적 장면전환과 유사한 형태의 영상으로 취급할 수 있음을 보인다.
그림 5와 같이 각각의 샘플링한 영상마다 영상을 균등하게 4등분하여 좌상과 우하는 전환구역(cut), 좌하와 우상은 점진적 전환(grad)구역으로 나누어 각 구역의 값의 비율을 식(4)와 같이 구한다.


그림 5. 차이값 샘플링 영상의 영역
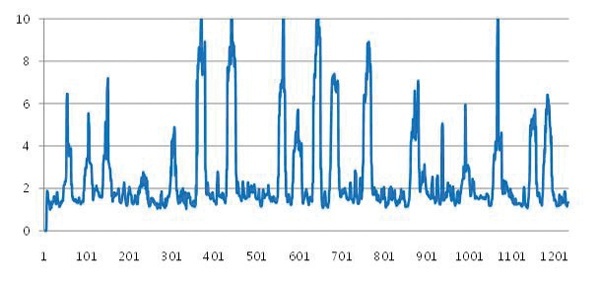
그림 6. M(i,σ)값들의 분포
i는 프레임 번호이다. 매 프레임마다 각 샘플링 σ별로 값을 가진다. cut(i,σ)는 전환 구역의 화소 값의 합, grad(i,σ)는 점진적 전환 구역의 화소 값의 합을 나타낸다. 각각의 σ마다 연속된 값들에서 국소 최댓값(Local Maxima)을 갖는 프레임을 장면전환 후보로 지정한다. 그림 6은 매 프레임마다 M(i,σ)값 중 최댓값을 보여준다.
움직임 벡터를 이용한 검증
저장된 동영상에 디코딩 과정에서 자동으로 얻어지는 움직임 벡터와 매크로 블록 형태를 이용하여 장면전환 여부를 최종 판단한다. 영상에서 I. B 및 P 프레임 중 B프레임을 제외하고 바로 이전과 현재 프레임의 변화정도를 움직임 벡터와 매크로 블록 형태를 가지고 두 프레임의 차이 값을 추출해 낸다. I 프레임의 경우 모두 인트라매크로 블록을 가지는 관계로 그림 7과 같이 바로 전, 후의 P 프레임에서 같은 위치에 매크로 블록으로부터 움직임 벡터를 예측해 낸다. 식(5)은 움직임 벡터 예측 식을 나타낸다.

그림 7. I 프레임에서 움직임 벡터 예측

mI는 I 프레임에서 x,y블록 위치에서 움직임 벡터, pre-p, nxt-p는 가장 가까운 전, 후에 P프레임을 나타낸다. α, β는 현재 프레임과 전, 후 프레임의 거리 가중치를 나타낸다. α, β의합은 1이다. 현재 프레임 i에서 전 프레임과의 차이 값 dist(i)은 식(7)과 같이 구한다. 블록의 차이를 나타내는 상태 Dblk는 매크로 블록의 조건에 따라 1, 0으로 구성되고 1이 되는 경우는 다음 표 2와 같다.


그림 8은 H.264, MPEG2 및 XVID의 주로 사용되는 3가지 비디오 저장 포맷별 식(7)의 dist(i)값을 비교한 그래프이다. 식(7)의 값이 큰 경우에는 거의 유사하나 작은 값에서 차이는 다소 보이나 전반적으로 포맷별 값의 차이는 크지 않다고 볼 수 있다. 불필요한 연산량을 줄이기 위해서 모든 프레임에서 dist(i)을 구하는 것이 아니라 앞에서 제시한 M(i,σ)의 국부 최댓값 주변 영역에서만 연산이 이루어지기 때문에 dist(i)를 구하는 프레임은 극히 일부분이다.

그림 8. 비디오 저장 포맷별 dist(i)값의 분포
제안된 장면전환 알고리즘 과정
제안된 알고리즘은 다음 Step을 거친다.
Step1. 디코딩된 영상에서 각각 수직, 수평 중심에서 영상정보와 매크로블록 관련 정보(움직임 벡터, 형태)를 얻어온다.
Step2. 시공간 슬라이스를 이용하여 시공간 히스토그램을 구한다.
Step3. 프레임별 히스토그램을 이용하여 이웃 프레임과 차이값 영상을 제작하여 M(i,σ)를 구한다.
Step4. 연속된 M(i,σ)에서 국소 최댓값 위치를 찾는다.
Step5. 찾은 최댓값 위치에서 해당 σ에 해당되는 구간에 dist(i)값을 구한다.
Step6. dist(i)값이 0.40 이상이면 장면전환 검출이라고 간주한다. dist(i)의 임계치 0.40는 실험값이다.
실험 및 결과
본 고에서 실험을 위해 실제 방송되는 뉴스, 다큐멘터리, 스포츠, 영화 등에 다양한 장르에 동영상을 이용하였다. 또한 공정한 실험을 위해 TRECVID2001 실험 영상을 포함하였다. 비디오 형식은 H.264 및 MPEG2를 사용하였다. 실험 평가는 일반적으로 가장 많이 사용되는 Recall, Precision 및 F-Measure 방법을 사용하였다. 정의는 식(8)과 같다. 모든 실험 데이터를 통해 Recall, Precision 값을 구하고, 그 결과를 이용하여 F-Measure를 구한다. 최대 F-Measure값을 가질 때에 설정한 실험 변수 값은 본 고의 실험치로 이용하였다.

Nc는 검출된 장면전환 수, Nm은 검출되지 못한 장면전환 수, Nf는 잘못 검출된 장면전환 수를 나타낸다.
표 3은 실험에서 사용된 비디오의 제원을 나타내며, 표 4는 실험에서 얻어진 비디오 성능 평가를 보여준다. 비교 대상 알고리즘으로는 TSS(Temporal spatial slice), Adaptive, TSI(TSIghua)들을 선택하였다. TSS는 시공간 슬라이스를 이용한 방법이고, Adaptive의 경우는 이웃하는 영상간의 히스토그램 기반 접근 방법으로 장면전환 임계값을 실험치를 따로 사용하지 않고 적응 기법을 이용한 알고리즘이다. 마지막으로 TSI 경우 그래프 컷을 장면전환 검출에 적용하였으나 최종 판단을 학습을 통해서 얻는 알고리즘이다.



그림 9. 성능 실험 결과
(a)제안된 실제 방송 실험 데이터 (b)TrecVid2001
이렇게 영상을 2가지로 구분한 이유는 Trecvid2001 영상들이 많은 연구에서 실험 영상으로 사용되고 있으나 오래된 영상이기 때문에 오늘날의 다양하고 복잡한 장면전환 형태에 비해 비교적 전환 형태가 단순하며 화질 면에서도 열화가 심한 편이기 때문이다. 그림 9(a)가 좀 더 현실성 있는 영상의 실험 결과로 볼 수 있다. 그림 9에서 제시 하듯 모든 실험 데이터에서 제안된 알고리즘이 우수하게 나옴을 알 수 있다.
비교 대상 TSI 알고리즘의 경우 학습과정이 들어감에 따라 제안한 실험 데이터 외에 4배 이상의 데이터를 이용하여 학습하여 얻은 결과이다. 성능 실험에 사용한 데이터에서만 학습할 경우 높은 성능을 발휘하지만 다른 데이터가 들어감에 따라 성능이 떨어짐을 알 수 있다.
그림 10에서는 처리 속도 실험 결과를 보인다. 보이는 것과 같이 제안된 알고리즘이 우수한 처리 속도를 보인다. 처리 시간을 측정할 때 디코딩 시간을 제외한 알고리즘 연산 시간만 측정하였다. 특히 중요한 점은 다른 알고리즘과 다르게 영상의 사이즈에 크게 영향 받지 않는다는 것이다.

그림 10. 처리 속도 실험 결과
결론
본 고에서는 기존 알고리즘의 단점을 보안하기 위해 프레임의 수직, 수평 중심의 시공간 및 매크로 블록의 정보를 통합하여 장면전환 검출의 알고리즘을 제안하였다. 제안된 알고리즘은 기존의 장면 알고리즘과 비교하여 성능 및 처리 속도가 효과적으로 개선되었다. 이는 장면전환이 이용되는 많은 분야에서 활용 가능할 정도의 속도개선이 괄목할 만한 속도 개선을 이룬다.
그러나 그림 9(a)에서 12번 비디오 데이터 경우에서와 같이 디졸브 영상에서 성능이 낮음을 알 수 있다. 이는 디졸브는 매크로 블록의 변화가 영상 전반에서 급격하게 변화지 않고 순차적으로 장시간에 변화하는 과정으로 인해 움직임 벡터를 이용한 최종 판단에서 미 검출되는 경우가 일어난다. 그러나 별도의 디졸브 알고리즘을 추가로 제안한 TSS알고리즘의 경우보다는 높음을 알 수 있다. TSS알고리즘의 경우 Fade Out/In의 경우에서만 국한한 결과이다. 실제 디졸브는 움직이는 두 영상의 점진적 교차가 다수를 이룬다. 반면 학습 알고리즘인 TSI의 경우 디졸브 영상에서 좋은 성능을 보인다. 그러나 학습의 특성상 어떤 원인에서 잘 검출되는지는 쉽게 파악할 수 없다.
본 고에서는 오직 수직, 수평만의 정보를 사용하였는데 이는 전체 영상을 이용함에서 오는 처리속도 저하 때문이다. 반대로 더 많은 영상 영역에서 정보를 이용할 경우 검출 성능의 향상을 가져올 수도 있다. 하지만 향상이 괄목할 정도의 향상은 아니다. 또한 움직임 벡터와 매크로블록 정보는 엔코더의 특성에 민감한 것도 무시할 수 없다. 추후 연구에서는 이러한 것들을 개선하기 위한 많은 실험과 노력이 필요하다.
저작권자 © CCTV뉴스 무단전재 및 재배포 금지
